Researchers from China and Denmark have developed a wearable lower-limb robot exoskeleton designed to help aid the gait rehabilitation of stroke and spinal cord injury patients.
The research team, from Beihang University in China and Aalborg University in Denmark, report in Review of Scientific Instruments that the robot exoskeleton is intended to help stroke patients strengthen their physical fitness, aid the rehabilitation training of paralyzed patients, or to assist those who need help performing daily activities.
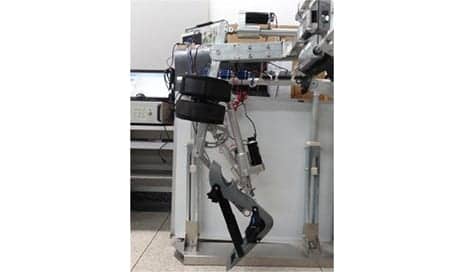
In their exoskeleton design, the team focused on the knee joint.
“Our new design features a parallel knee joint to improve the bio-imitability and adaptability of the exoskeleton,” explains Weihai Chen, a professor at Beihang University’s School of Automation Science and Electrical Engineering, in Beijing, China, in a media release from American Institute of Physics.
Specifically, the release explains, the exoskeleton taps a hybrid serial-parallel kinematic structure consisting of a 1-degree of freedom (DOF) hip joint module and a 2-DOF knee joint module in the sagittal plane. And a planar 2-DOF parallel mechanism helps to fully accommodate the motion of the human knee—enabling rotation and relative sliding.
Chen notes that the exoskeleton’s design may be the first known use of a parallel mechanism at the knee joint to imitate skeletal muscles.
“Our design goes beyond solving the transparency problem in the knee joint — and it’s a simple structure,” Chen adds. “Unlike most previous exoskeletons, which simplified the knee joint as a pin joint, ours provides 2 DOF to make the exoskeleton’s movement consistent with a patient’s natural movement.”
Chen and others on the team are exploring the use of electromyography signals to control the exoskeleton.
“We can obtain the movement intention from a patient’s electroencephalogram (EEG)—brain signals—and use it to directly control the exoskeleton,” Chen explains. “These improvements should enable easy control and make the exoskeleton act as part of the human body.”
The team’s next step will be to collaborate with hospitals to test the exoskeleton with patients.
“We’d also like to commercialize it in the near future, so we’ll be working to make the robot’s appearance fancier and enhancing the user interface to be more user friendly,” Chen notes in the release.
[Source(s): American Institute of Physics, Newswise]
[Photo of exoskeleton prototype courtesy of Beihang University]