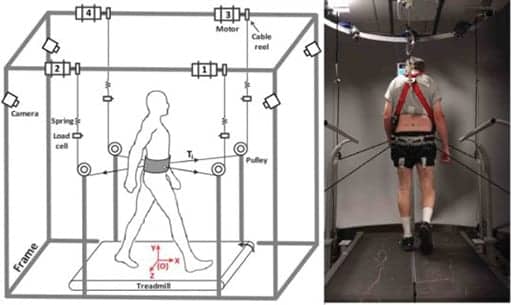
Shown here is a schematic of the robot-driven Tethered Pelvic Assist Device, developed at Columbia University. On the right, the TPAD is used in a study to see how well it can help improve stability in Parkinson’s disease patients while walking. (Photo courtesy of Sunil Agrawal/Columbia Engineering)
Using a robotic system known as a Tethered Pelvic Assist Device (TPAD), researchers from Columbia University note the ability of Parkinson’s disease (PD) patients to control their gait and balance unperturbed.
The team—led by Sunil Agrawal, professor of mechanical engineering and of rehabilitation and regenerative medicine at Columbia Engineering—suggests that the ability to adapt to multiple perturbations or to modify responses to changing amplitudes or directions was not affected by PD; both the Parkinson’s and the healthy subjects controlled their reactive strategies in the same way. In fact, both groups improved their unperturbed walking after a single training session with repeated waist pull perturbations, explains a media release from Columbia University School of Engineering and Applied Science.
Their study, published recently in Scientific Reports, included nine patients with PD and nine age-matched control subjects.
The TPAD robotic system used in the study is a wearable, lightweight cable-driven robot that can be programmed to provide forces on the pelvis in a desired direction as a subject walks on a treadmill. It was invented in the Robotics and Rehabilitation Laboratory (ROAR).
In the study, the release continues, the researchers evaluated the margin of stability and base of support while the study participants walked without cables on a treadmill. Then the participants were hooked up to the TPAD’s cables and given waist-pull diagonal perturbations for brief periods to assess their reactions.
Each group was then trained with 72 randomly applied pelvic force perturbations that varied in direction (forward/backward/sideways), intensity (low/medium/high), and the specific foot (right/left) in contact with the ground. After this training period, they walked freely without the cables and underwent the same diagonal perturbations they had been given before training.
These post-sessions were conducted to assess the effects of training on their balance and stability.
The team found that the Parkinson’s disease patients had a reduced stability in the forward direction before and after training compared to the healthy subjects and an inability to produce proactive anticipatory adjustments. Once all the subjects completed the training session, both groups were able not only to improve their response to the perturbations, but also to produce short-term aftereffects of increased gait stability.
“Our data showed that one single session of perturbation-based balance training produced acute effects that ameliorated gait instability in PD patients,” says post-doctoral researcher Daario Martelli, the study’s first author, in the release. “This result is encouraging for designing new therapeutic interventions that remediate falls risk.”
The researchers are now planning future studies to examine if a multi-session training program will demonstrate more lasting effects on walking balance, improve function, and reduce the number of falls in long-term assessments.
[Source(s): Columbia University School of Engineering and Applied Science]